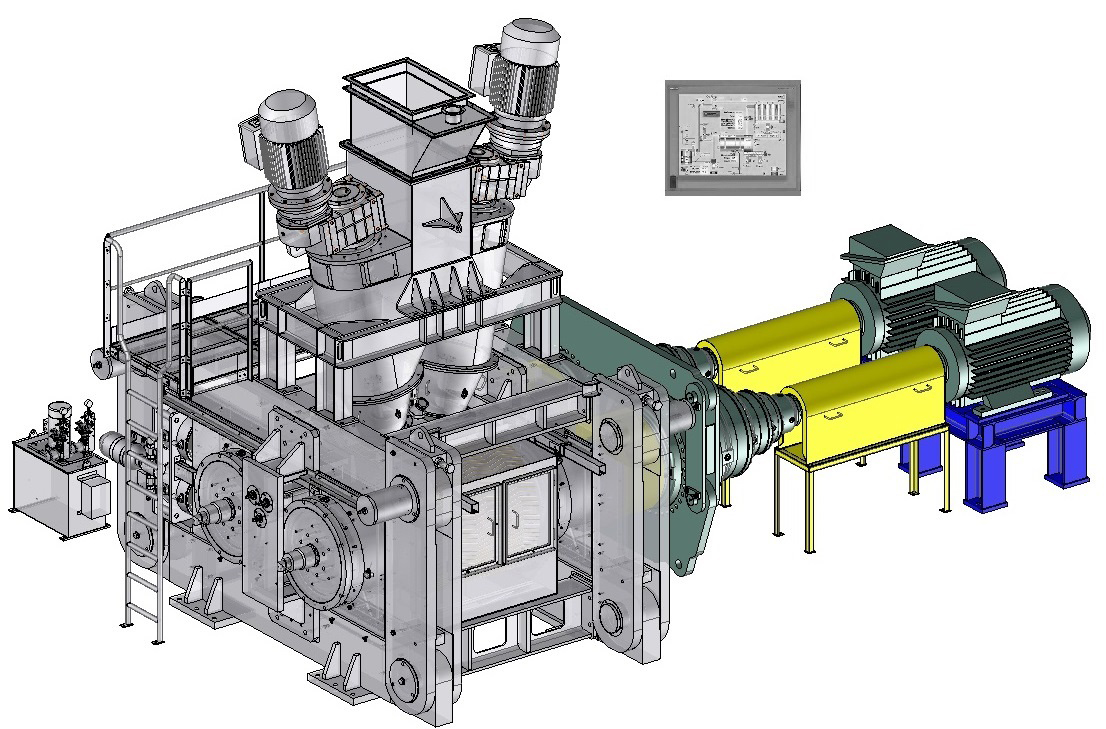
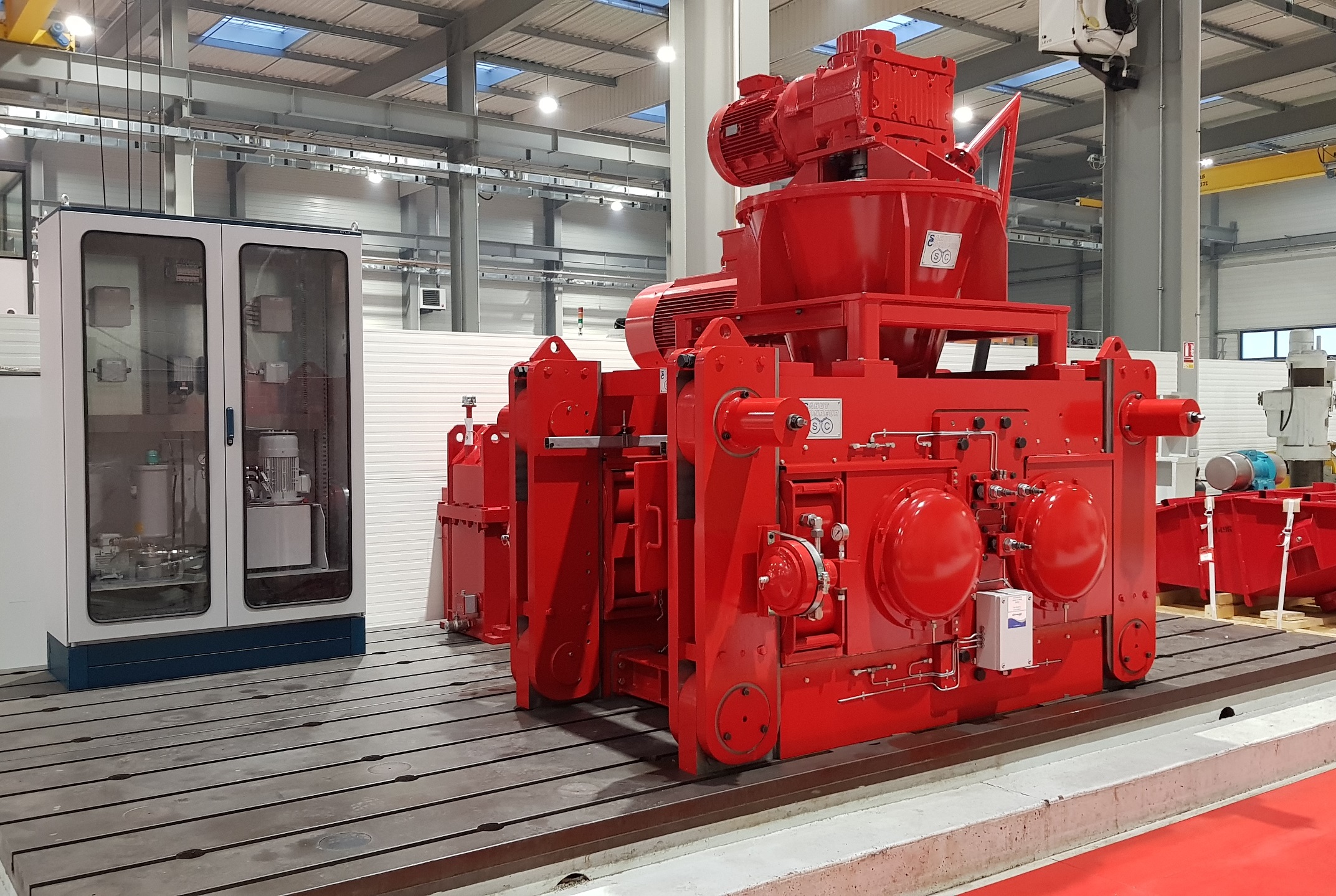
Compacteur
SAHUT‐CONREUR
conçoit et fabrique des compacteurs pour une utilisation intensive dans des conditions difficiles, avec une utilisation fiable et un entretien minimal. Cliquez sur les différentes parties de ce compacteur pour découvrir ses principaux composants.Vue dynamique
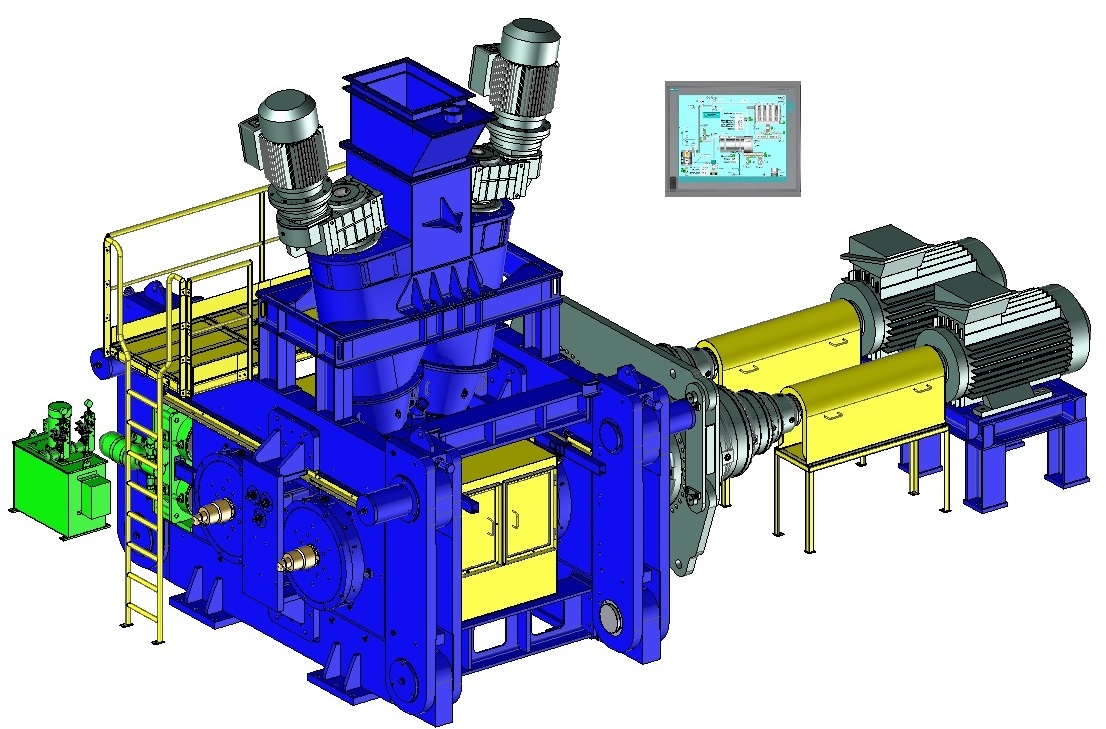
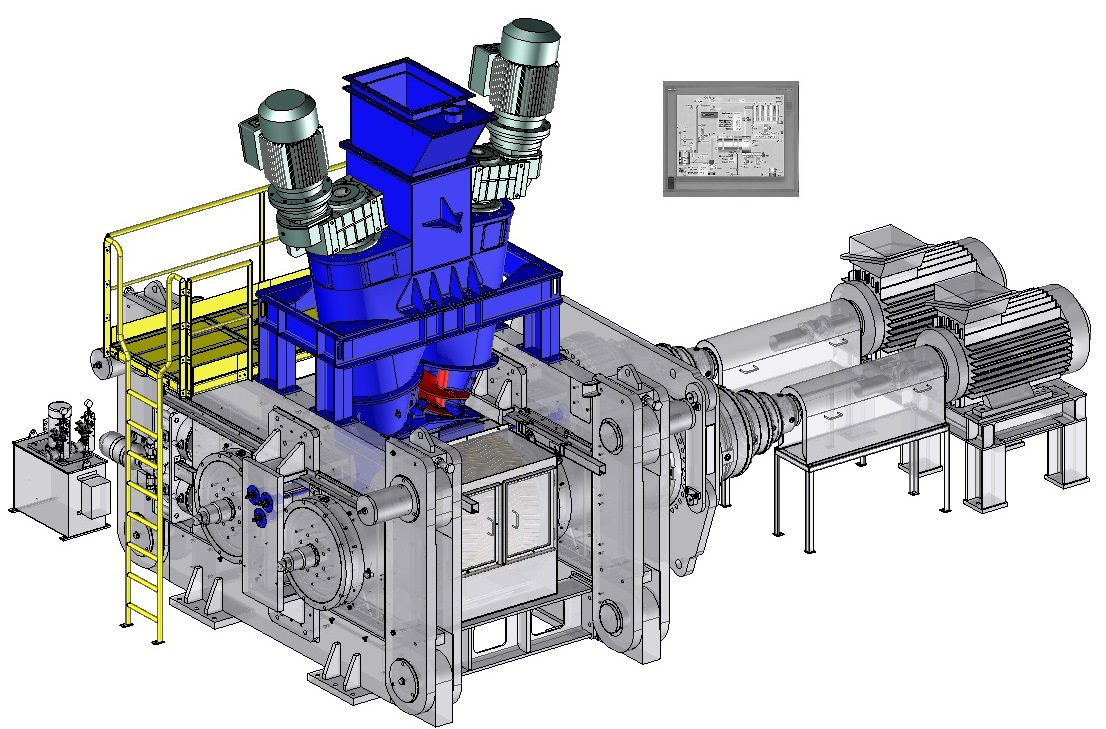
Système d'alimentation
Le système d'alimentation est essentiel pour que le compacteur soit pleinement efficace :SAHUT-CONREUR
a développé 2 types de systèmes sélectionnés en fonction du produit traité :
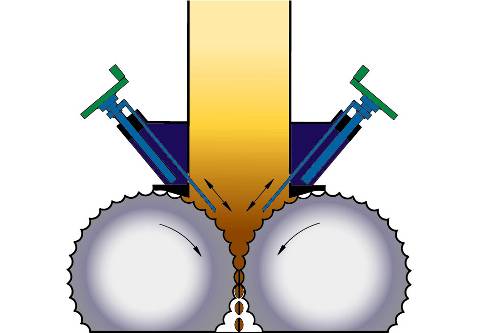
Trémie
Alimentant les roues par gravité, ce système peut, si nécessaire, être équipé de volets inclinés dont la position est réglée manuellement ou automatiquement.
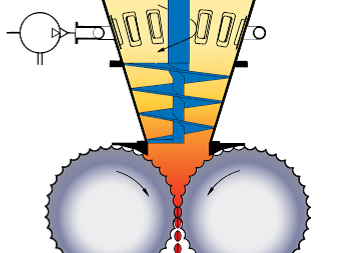
Précompacteur équipé d'une ou deux vis coniques
Pour pré-densifier la matière première et alimenter les roues. Pour les produits très aérés, le précompacteur peut être équipé d'un système de mise à vide (pompe à vide) pour éliminer l'air contenu dans le produit.
Ces 2 systèmes d'alimentation peuvent être équipés d'un système spécial de flasques flottants réduisant les fuites de poudre sur les côtés des roues et assurant une meilleure efficacité dans la zone de compactage.
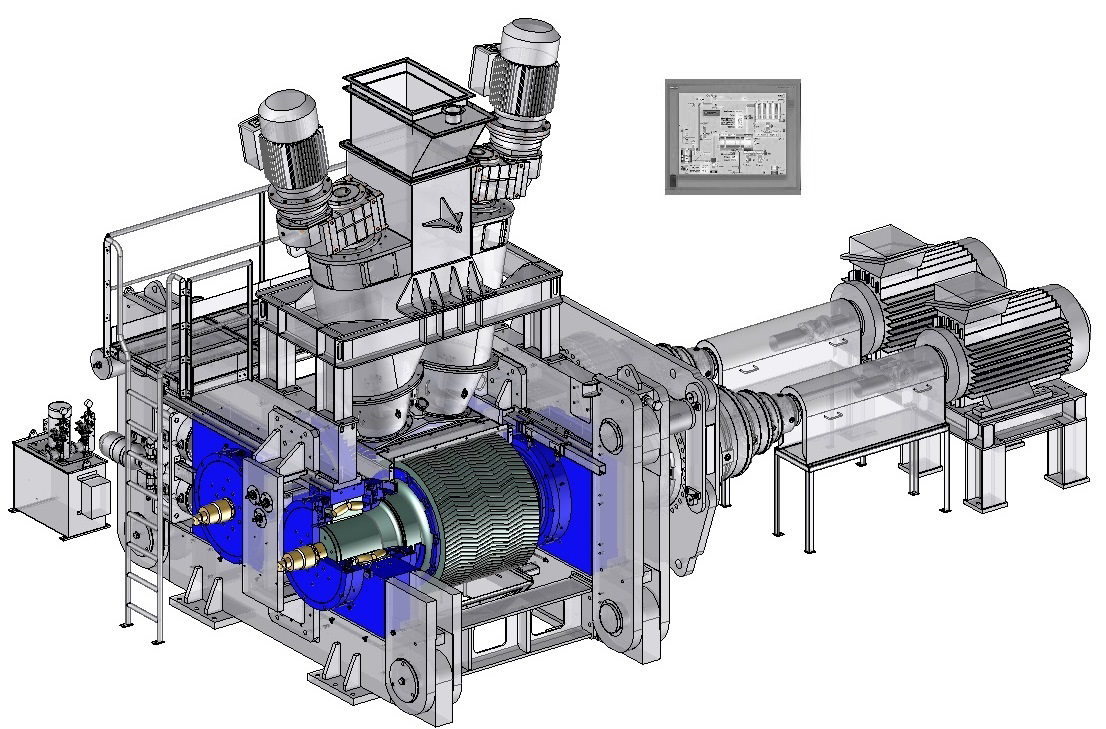
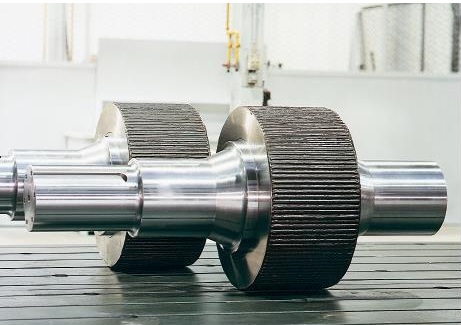
Roues
Surface des roues
Le compacteur est composé de deux roues : l'une est fixe dans son bâti (roue fixe) tandis que l'autre roue peut se déplacer perpendiculairement à son axe (roue mobile) en faisant varier l'espace entre les deux roues. La taille d'un compacteur est caractérisée par son diamètre (de 150 mm à 1400 mm) et par sa largeur (de 30 mm à 1200 mm).
Trois solutions technologiques sont possibles pour la surface de travail des roues :
Trois solutions technologiques sont possibles pour la surface de travail des roues :
- arbres avec frettes alvéolées (couronnes frettées à chaud sur les arbres) – en option avec système de refroidissement.
- arbres avec secteurs boulonnés (les secteurs sont fixés sur l'arbre à l’aide de 2 couronnes de serrage) – en option avec système de refroidissement.
- arbres monoblocs profilés - en option avec système de refroidissement.
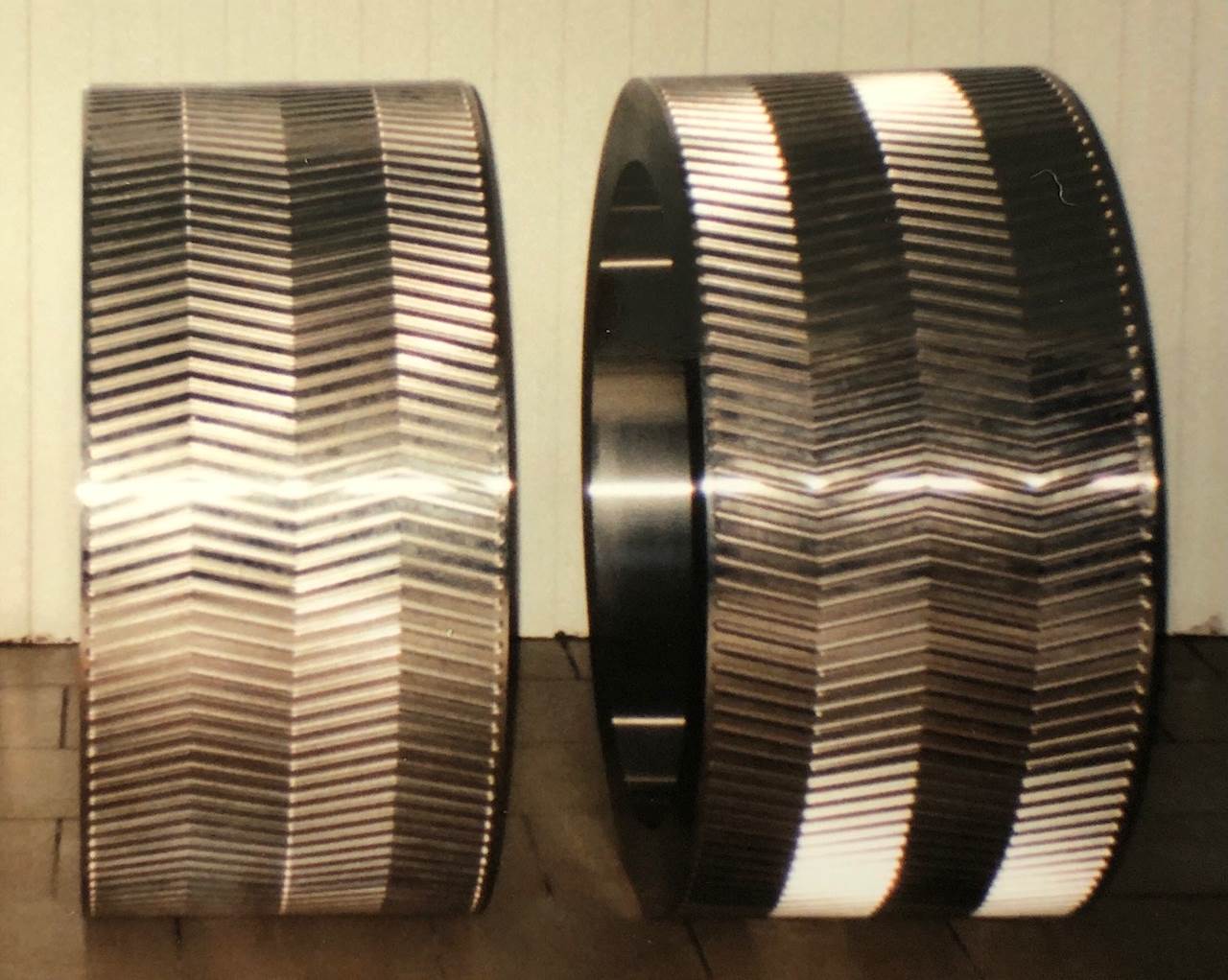
Des matériaux spéciaux traités (acier allié, acier inoxydable, fonte, traitements thermiques spéciaux ...) sont utilisés pour la fabrication des frettes et des secteurs, en fonction de l'abrasivité du produit, de son effet corrosif et des conditions de compactage (température du produit, pression de compactage).
Roulements des roues
Ces roues sont montées sur des roulements robustes dimensionnés pour une longue durée de vie, lubrifiés manuellement ou automatiquement par de la graisse ou de l'huile. Pour des applications particulières, le refroidissement des arbres et des roulements peut être installé.Bâti
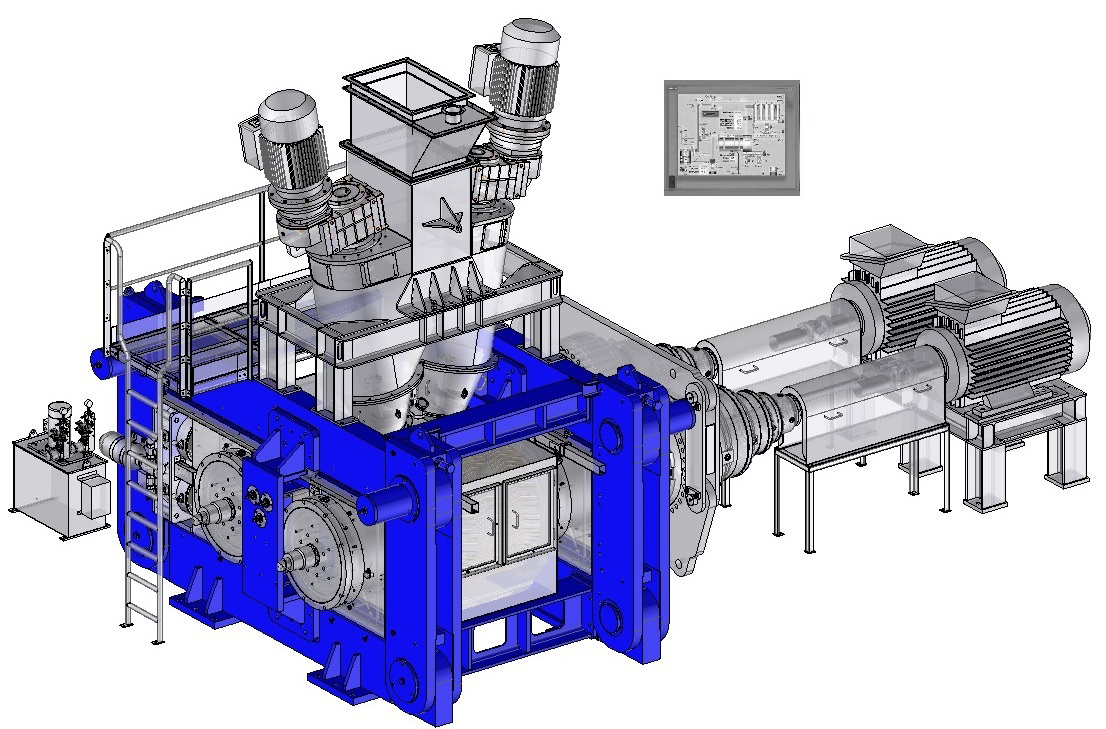
En standard, le compacteur est composé d'un bâti en acier spécial usiné dont la masse est suffisante pour supporter les fortes pressions de compactage.En option, de façon à extraire rapidement les roues et effectuer leur maintenance, un bâti articulé peut être installé. Ce système permet de remplacer les roues sans démonter le système d'alimentation et les composants situés au-dessus de celles-ci.

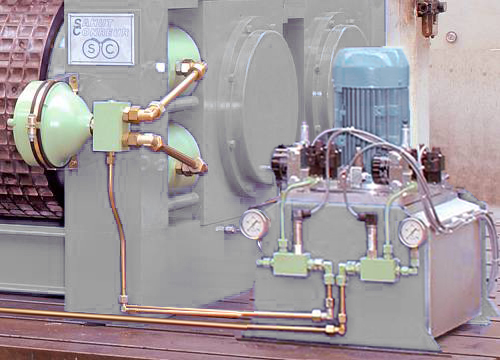
Système hydraulique
Le compacteur est équipé d'un système hydraulique capable d'appliquer une force sur la roue mobile au moyen de vérins. Cette force peut être différente dans certains cas sur chaque palier de la roue mobile grâce à un double circuit hydraulique. Ce système comprend également des dispositifs de sécurité et des accumulateurs d'azote permettant d’amortir le mouvement et le retour rapide de la roue mobile et ainsi protéger la presse en cas de passage d’un corps étranger entre les roues.
La force appliquée sur le produit peut varier de 5 to 120 KN/cm.
La force appliquée sur le produit peut varier de 5 to 120 KN/cm.
Commande des roues
Le compacteur est équipé d'un réducteur de vitesse à deux sorties et d'accouplements à dentures capables d’accepter un désalignement axial de la roue mobile. La vitesse des roues peut aller jusqu'à 25 tr/min et même plus dans certains cas ; cela correspond à une vitesse tangentielle des roues jusqu'à environ 1,5 m/s.
Dans certains cas particuliers (couple élevé, espace restreint,...), d'autres systèmes de commande (réducteurs planétaires, moteur hydraulique) peuvent être utilisés.
Dans certains cas particuliers (couple élevé, espace restreint,...), d'autres systèmes de commande (réducteurs planétaires, moteur hydraulique) peuvent être utilisés.


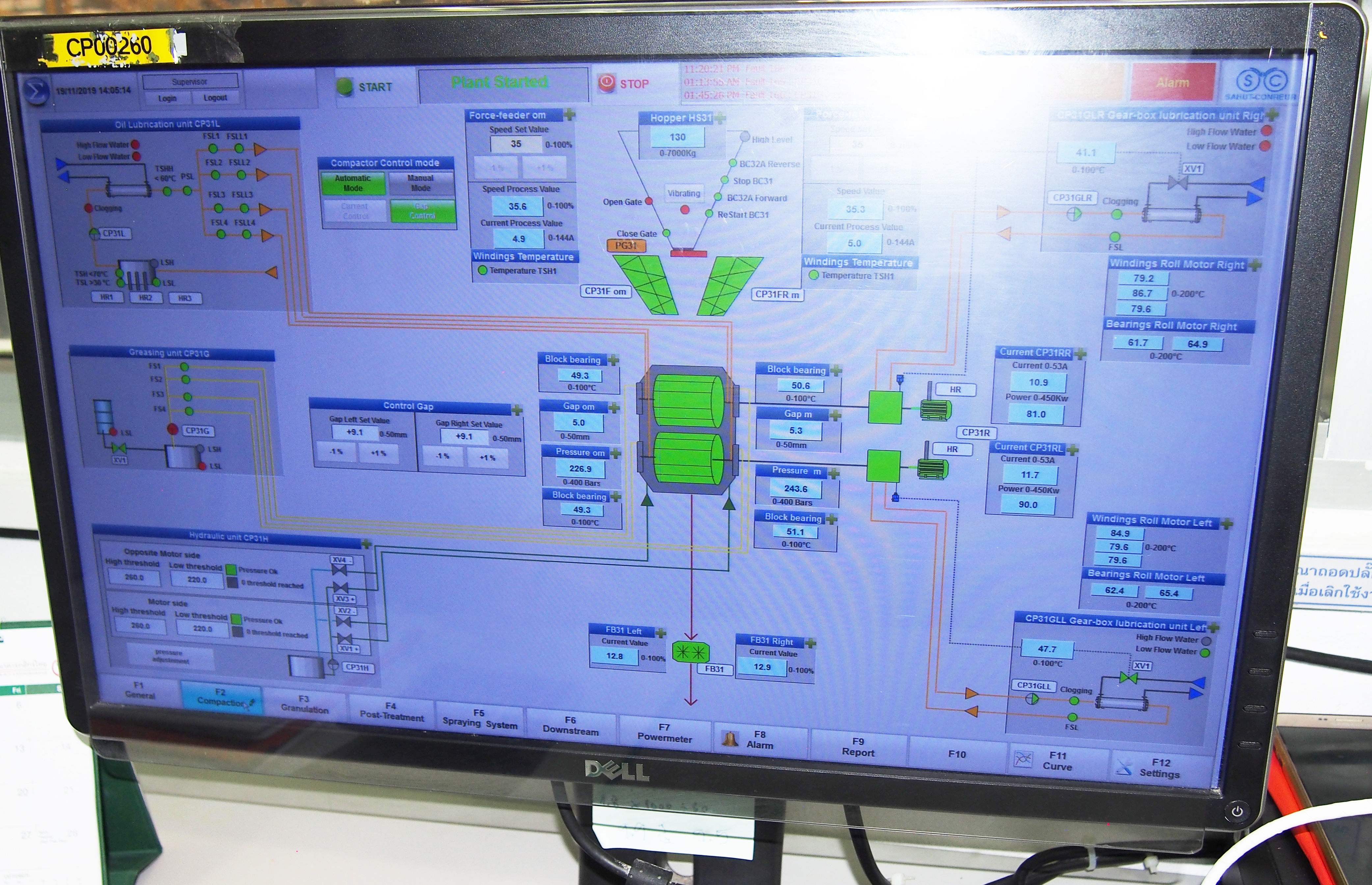
Contrôle-automatisation
Un niveau d'automatisation élevé assure un fonctionnement continu et constant du compacteur sans opérateur. Le système de contrôle-commande est basé sur des signaux provenant de la mesure d’entrefer, de la valeur de la pression de compactage et des vitesses/puissances absorbées par le précompacteur/les roues.
Dans le cas d’une trémie à volets installée comme système d'alimentation, deux boucles de régulations peuvent être installées pour assurer le fonctionnement du compacteur :
- Soit le contrôle du positionnement des volets de la trémie en fonction de la puissance consommée par le moteur des roues.
- Soit le contrôle du positionnement des volets de la trémie en fonction de l’entrefer.
- Soit le contrôle de la vitesse de la vis du précompacteur en fonction de la puissance consommée par le moteur des roues.
- Soit le contrôle de la vitesse de la vis du précompacteur en fonction de l’entrefer.